
Das Rolling Chassis von Schaeffler eröffnet neue Mobilitätslösungen
Alexander Böhm | Dr. Manfred Kraus
Elektrifizierung, automatisiertes Fahren, Konnektivität und Sharing-Angebote bieten zusammen die ideale Grundlage für neue Mobilitätskonzepte mit fahrerlosen Shuttle-Systemen. Um ihren wirtschaftlichen Betrieb zu ermöglichen und sie dadurch marktfähig zu machen, treibt Schaeffler gemeinsam mit dem Partner Mobileye die Entwicklung autonomer Transportlösungen weiter voran. Dazu erstellt Schaeffler ein Rolling Chassis, das alle für die Fahrfunktionen relevanten Komponenten, das heißt Antrieb, Bremse, Lenkung und Batterie, modular zusammenfasst. Mithilfe von Partnerschaften für die Gesamtfahrzeugintegration und für die Fahrautomatisierung können auf Basis des Rolling Chassis Komplettfahrzeuge für den Personen- und Gütertransport verwirklicht werden, vom Robo-Taxi bis zum autonomen Lieferfahrzeug. Durch eine Ergänzung mit intelligenten Infrastruktursystemen und Konnektivitätsmöglichkeiten lassen sich auf dieser Grundlage umfassende Mobilitätslösungen umsetzen.
- Entwicklung des urbanen Verkehrs
- Autonome Transportsysteme
- Entwicklungsstrategie für neue Mobilitätsformen
- Radnabenmotoren
- E-Achse
- By-Wire-Lenksystem
- Corner Module
- Zentrale Steuerung des Rolling Chassis
- Modularität und Skalierbarkeit
- Fahrzeugplattform
- Robo-Shuttle-Ökosystem
- Zusammenfassung
- Literatur
Entwicklung des urbanen Verkehrs
Betrachtet man den Verlauf der Mobilität über die vergangenen 150 Jahre, erkennt man rasch, dass die vielzitierte Verkehrswende kein auf die Neuzeit beschränktes Phänomen ist. Bereits Ende des 19. Jahrhunderts zeichnete sich ein Mobilitätswandel ab, der aufgrund von verkehrsbedingten Umweltproblemen zwingend erforderlich wurde – viele Städte drohten im Mist der Pferde von Kutschen und Fuhrwerken geradezu zu ersticken. Und so wurde um die Jahrhundertwende damit geworben, durch das Automobil auf Pferde als Antrieb verzichten zu können und so die Stadt sauber zu halten. Bekanntlich setzten sich in den folgenden Jahren Automobile gegenüber Pferden weltweit durch, Bild 1.

Gewisse Parallelen zu heute sind offensichtlich, denn auch die aktuellen Umweltbelastungen machen einen radikalen Technologiesprung bei der Mobilität erforderlich. In Deutschland verursacht der Straßenverkehr rund 20 % der Gesamt-CO2-Emissionen [1]. Infolgedessen werden neue, saubere Technologien den Verbrennungsmotor bald ersetzen, genauso wie er seinerzeit selbst das Pferd verdrängt hat. Allerdings sind damit nicht alle Probleme mit der heutigen Mobilität gelöst. Ein Punkt ist der hohe Flächenbedarf für Parkplätze insbesondere im urbanen Raum. In Deutschland entspricht der für Fahrzeuge reservierte Parkraum einer Fläche von rund 270.000 Fußballfeldern. Ein anderer Aspekt ist die hohe Zahl an Verkehrsunfällen – weltweit sind mehr als 1,3 Mio. Verkehrstote im Jahr zu verzeichnen. Zusätzlich zum daraus resultierenden volkswirtschaftlichen Schaden verursachen Staus weitere rund 80 Milliarden Euro direkte und indirekte Kosten.
Diese Probleme lassen sich allein durch den Umstieg auf die Elektromobilität nicht lösen, und es ist absehbar, dass sie sich künftig zuspitzen werden. Denn der Trend zur Urbanisierung verstärkt sich weltweit immer mehr, bis 2050 werden nach Hochrechnungen der Vereinten Nationen 68 % der Weltbevölkerung in städtischen Gebieten leben [2]. Zum Vergleich: Noch 1950 waren es nur 30 %. Dementsprechend ist die Anzahl der Stadtbewohner seit 1950 weltweit rapide von 751 Millionen auf 4,2 Milliarden im Jahr 2018 angestiegen, und bis 2050 werden nochmals 2,5 Milliarden mehr Menschen in den Städten leben. Viele Metropolen steuern daher einem künftig weiter zunehmendem Individualverkehr schon heute gegen und versuchen, die Anzahl von privaten Pkw zu reduzieren und andere Verkehrskonzepte zu fördern. Ein Beispiel ist Paris. Die französische Hauptstadt ist auf dem Weg, sich städtebaulich zu einer „15-Minuten-Stadt“ zu transformieren, bei der alle Grundbedürfnisse innerhalb dieses Zeitraums zu Fuß oder mit dem Fahrrad von der Wohnung aus erfüllt werden können, Bild 2. In anderen Städten werden Bonus-/Malussysteme für Pkw eingeführt oder ihre Anzahl beispielsweise über eine Limitierung der Zulassungen oder Parkplätze reduziert.

Autonome Transportsysteme
Auch die Automobilindustrie stellt sich diesen Herausforderungen und entwickelt durch die Verknüpfung von Konnektivität, Elektrifizierung, automatisiertem Fahren und Sharing-Angeboten neue Mobilitätskonzepte. Schaeffler hat hierzu bereits 2018 den Schaeffler Mover vorgestellt [3], Bild 3. Er soll künftig eine schnelle und komfortable Beförderung vieler Personen bei hoher Effizienz und Umweltfreundlichkeit ermöglichen. Das Konzept des Transportsystems sieht automatisiertes Fahren des SAE-Levels 4 (Hochautomatisierung) vor. Wie eine gemeinsam von der Boston Consulting Group und der Universität St. Gallen 2020 durchgeführte Studie gezeigt hat, könnten mittels eines geänderten Verkehrsmix unter Integration von autonomen Robo-Taxis die städtischen Emissionen um mindestens 12 % gesenkt, 35 % der Parkflächen anderweitig genutzt und die Anzahl der Unfalltoten um 37 % reduziert werden. Hinzu kommt ein geringeres Stauaufkommen.

Allein in Deutschland wurden bereits knapp 60 Pilotprojekte mit autonomen Shuttle-Systemen durchgeführt. Allerdings sind für einen wirtschaftlichen Einsatz im Realbetrieb noch einige Hürden zu nehmen. Die bisherigen Projekte waren insbesondere dadurch limitiert, dass es gesetzlich nicht erlaubt war, die Systeme auf öffentlichen Straßen ohne begleitendes Sicherheitspersonal zu betreiben, das in Gefahrensituationen die Fahrzeugführung übernimmt. Mit einem neuen Gesetz zum autonomen Fahren wurde in Deutschland 2021 der Rechtsrahmen geschaffen, damit hochautomatisierte Kraftfahrzeuge in festgelegten Betriebsbereichen im öffentlichen Straßenverkehr im Regelbetrieb fahren können – und das bundesweit [4]. Damit nimmt Deutschland eine Vorreiterrolle ein, andere Länder werden voraussichtlich bald folgen.
Wie zahlreiche Rückmeldungen von Betreibern der Shuttle-Systeme aus den Pilotprojekten gezeigt haben, existieren neben den gesetzlichen Hürden zwei wesentliche technische Einschränkungen:
- Bei vielen Pilotprojekten fahren die Fahrzeuge auf zuvor abgemessen Strecken. Sie werden über einen Soll-Ist-Vergleich der Fahrtrajektorie gesteuert oder nutzen Magnetstreifen, fahren also auf einer virtuellen Schiene. Auf notwendige Änderungen der Fahrlinie, beispielsweise um ein am Straßenrand parkendes Fahrzeug zu umfahren, können sie nicht reagieren. In diesem Fall stoppt die Elektronik das Fahrzeug aus Sicherheitsgründen, was zu Verzögerungen im Fahrbetrieb führt.
- Die Fahrzeuge sind derzeit noch oftmals auf einen limitierten Einsatzbereich ausgelegt und für eine geringe Maximalgeschwindigkeit (meist 25 km/h) zugelassen. Zudem verfügen sie nicht über wichtige aktive Sicherheitssysteme wie ABS und ausreichend redundante Steuerungssysteme.
Gemeinsam mit dem Partner Mobileye wird Schaeffler Lösungen für beiden Punkte vorantreiben. Das Ziel ist dabei, einen wirtschaftlichen Betrieb von autonomen Shuttle-Systemen zu ermöglichen und sie dadurch marktfähig zu machen. Schaeffler rechnet damit, dass mittelfristig jedes zehnte Fahrzeug auf der Straße ein automatisiertes Transportsystem sein könnte. Robo-Shuttles werden also auch künftig die konventionellen Pkw nicht ersetzen, sondern das Mobilitätsangebot sinnvoll ergänzen.
Entwicklungsstrategie für neue Mobilitätsformen
Bild 4 stellt die Entwicklungsstrategie von Schaeffler im Bereich neuer Mobilitätsformen grafisch dar. Die Basis bilden Produktinnovationen beim Antrieb und bei Lenkungssystemen. Darauf aufbauend entwickelt Schaeffler ein sogenanntes Rolling Chassis, das alle für die Fahrfunktionen relevanten Komponenten, also Antrieb, Batterie, Bremse und Lenkung, modular und skalierbar zusammenfasst. Durch eine hochentwickelte Drive-by-Wire-Technologie ist dabei ein sicherer Betrieb auf der öffentlichen Straße möglich. Mithilfe von Partnerschaften für die Gesamtfahrzeugintegration und für die Fahrautomatisierung können Komplettfahrzeuge für den Personen- und Gütertransport verwirklicht werden, vom Robo-Taxi bis zum autonomen Lieferfahrzeug. Durch eine Ergänzung mit intelligenten Infrastruktursystemen und Konnektivitätsmöglichkeiten lassen sich auf dieser Grundlage umfassende Mobilitätslösungen umsetzen, wie sie künftig von Mobilitätsprovidern der öffentlichen Hand oder der Privatwirtschaft angeboten werden.

Im Folgenden werden die einzelnen Bausteine der Entwicklungspyramide aus Bild 4 detaillierter dargestellt, beginnend mit den Schaeffler-Produkten für Antrieb und Lenkung über deren Integration bis hin zur funktionalen Zusammenführung der Einzelsysteme zu einem Rolling Chassis.
Radnabenmotoren
Die bei Schaeffler derzeit in Entwicklung befindlichen Radnabenmotoren bestehen vornehmlich aus den Motorbauteilen Stator und Rotor, dem Untersetzungsgetriebe und einer integrierten Bremsanlage, Bild 5. Der Inverter ist nicht integriert, sondern kann flexibel im Fahrzeug platziert werden. Je nach Anwendung steuert ein Inverter ein bis zwei Radnabenmotoren. Die Antriebsleistung der Motoren korreliert mit ihrer Baugröße und kann im Baukastenprinzip skaliert werden. Die Leistungsbandbreite der Motoren erstreckt sich von 7 bis 26 kW (nominal), die zeitlich begrenzt erzielbare Maximalleistung beträgt 14 bis 60 kW. Die entsprechenden Antriebsmomente sind 730 Nm (nominal) beziehungsweise 1650 Nm (maximal). Eine wichtige Kennzahl stellt dabei die Drehmomentendichte im Rad dar, die dank Integration aller Antriebsvarianten in eine 14-Zoll-Felge bis zu 118 Nm pro Zoll Felgengröße beträgt. Aufgrund des Kühlbedarfs durch die hohe Leistung sind die Radnabenmotoren mit einer Flüssigkeitskühlung ausgerüstet. Der Wärmeaustausch mit der Außenluft erfolgt über einen oder mehrere Kühler, die separat im Fahrzeug untergebracht sind. Schaeffler entwickelt Radnabenmotoren für elektrische Spannungen von 48 und 400 V, perspektivisch sind auch höhere Spannungen denkbar. Nach derzeitigen Planungen findet der Serienanlauf der Radnabenmotoren von Schaeffler im Jahr 2023 statt.

E-Achse
Alternativ zu Radnabenmotoren kann das Rolling Chassis mit einer E-Achse ausgerüstet werden, Bild 6. Der elektrische Antriebsmotor sitzt dabei zwischen den Rädern, die Kraftübertragung zu den Rädern erfolgt mechanisch über Antriebswellen. Eine Besonderheit der Schaeffler-Lösung ist der konstruktive Aufbau mit einem Stirnraddifferenzial, wodurch eine konzentrische und damit raumsparende Anordnung der Antriebswellen zum Rotorachse des Motors möglich ist. Alle im Bereich neuer Mobilitätskonzepte eingesetzten E-Achsen von Schaeffler verfügen über eine integrierte Leistungselektronik und sind mit einer Flüssigkeitskühlung ausgerüstet. Die Leistungsbandbreite beträgt 50 bis 500 kW (nominal) beziehungsweise maximal 2000 bis 8000 Nm (maximal). Schaeffler fertigt E-Achsen bereits seit 2018 in Serie und wird bis 2027 eine Produktionsziffer von mehreren Millionen Einheiten jährlich erreichen.

By-Wire-Lenksystem
Fahrerlose, elektronisch gesteuerte Fahrzeuge benötigen ein Steer-by-Wire-System, bei dem die Übertragung der Lenkbefehle nicht mehr mechanisch durch Lenksäule und Lenkrad, sondern elektronisch erfolgt. Bei der Umsetzung eines leistungsfähigen und sicheren Systembaukastens folgt Schaeffler einem stringenten und straffen Innovationsplan, der auf Komponentenebene eine mechatronische Hinterachslenkung (intelligent Rear Wheel Steering, iRWS) und sogenannte Powerpacks umfasst, Bild 7 [5]. Bei der Entwicklung fließen die umfangreichen Erkenntnisse ein, die bei der Umsetzung des Steer-by-Wire-Systems Space Drive von Schaeffler gewonnen wurden. Ein Powerpack besteht aus dem Elektromotor, der die Lenkkräfte aufbringt, und der zugehörigen Leistungselektronik. Für Rolling-Chassis-Applikationen kann die Motoreinheit mit einer oder mehreren Stirnrad-Getriebestufen kombiniert werden, um das System optimal an die in der Applikation geforderten Drehzahlen und Lenkmomente anpassen zu können. Diese für eine Bordnetzspannung von 12 V oder 24 V geeigneten Antriebe liefern Leistungen bis zu 880 W.
Die eingesetzte Leistungselektronik verfügt über entsprechende Redundanzen im Leistungs- und Logikteil und ist damit auf die Anforderungen vorbereitet, die an die Funktionale Sicherheit zukünftiger Steer-by-Wire-Anwendungen gestellt werden. Beispielsweise können Elektromotoren mit einer doppelten Wicklung betrieben werden, um einen Ausfallschutz bei Defekten sicherzustellen. Schaeffler hat die Power-Packs so konzipiert, dass Projektpartner diese bei der Umsetzung gemeinsamer Rolling-Chassis-Entwicklungen mit eigenen mechanischen Lenkungskomponenten kombinieren können. Der Lenkungsbaukasten von Schaeffler erlaubt damit einen flexiblen Einsatz im Bereich autonomer Shuttle-Systeme.

Corner Module
Das speziell für das Rolling Chassis entwickelte Corner Module umfasst die Radaufhängung inklusive Federung. Zusätzlich können der Aktor für die elektromechanische Lenkung und ein Radnabenmotor integriert werden. Bei letzterem entfallen die konventionellen Antriebswellen. Das bietet Potenzial für eine bessere Raumnutzung im Fahrzeug und damit mehr Transportkapazität. Mit dem großen Lenkeinschlag der Corner Modules von -90 bis +45° kann das Fahrzeug in engen Straßen spielend manövrieren. Wenn vier Corner Modules mit integrierten Radnabenmotoren im Fahrzeug eingesetzt werden, sind sogar ein seitliches Einparken und ein Wenden auf der Stelle möglich.

Zentrale Steuerung des Rolling Chassis
Die logische Weiterentwicklung des im Corner Module umgesetzten Integrationsansatzes ist der systemische Verbund von vier Einzelmodulen in einem Rolling Chassis. Die Koordination der vier Corner Modules untereinander erfolgt durch eine zentrale Steuereinheit, die Chassis Control Unit (CCU), Bild 9. Die CCU rechnet die übergeordneten Steuerungsbefehle für die Längs- und Querführung des Fahrzeugs in die individuellen Kontrollsignale für die einzelnen Corner Modules um und steuert radselektiv die Stellglieder Lenkung, Bremse und Antrieb. Die Kommunikation mit den einzelnen Modulen sowie dem Fahrzeugsteuergerät (Vehicle Control Unit, VCU) erfolgt zweikanalig über den CAN-Bus oder den leistungsfähigeren CAN-FD (CAN mit flexibler Datenrate). Die Eingangssignale der CCU kommen dabei entweder direkt von der VCU, der ECU, der Steuerung für die automatisierte Fahrfunktion oder alternativ, beispielsweise zur Durchführung manueller Fahrmanöver bei Servicearbeiten, von einem Bedienteil (Sidestick) im Fahrzeug. Die flexibel ausgelegte CCU-Architektur kann neben Corner Modules mit Radnabenmotor und integriertem Lenkaktor auch Antriebstopologien mit einer E-Achse und einer zentral angeordneten Lenkung in der Fahrzeugmitte steuern, Bild 10.


Mit der Entwicklung der CCU entspricht Schaeffler dem Wunsch einer Vielzahl der künftigen Kunden. Denn wie sich in zahlreichen Rückmeldungen und als Ergebnis praktischer Ausführungsbeispiele immer wieder herauskristallisiert hat, ermöglicht eine zentrale Schnittstelle zum Rolling Chassis eine einfache Integration in unterschiedliche kundenspezifische Fahrzeugarchitekturen und wird daher als besonders zielführend angesehen.
Für die Entwicklung der CCU-Architektur nutzt Schaeffler Erkenntnisse, die mit der Space-Drive-Technologie in mehr als zehn Jahren Felderfahrung und mehr als eine Milliarde Kilometer gesammelt wurden. Diese Erkenntnisse werden auch für die Gestaltung das Sicherheitskonzept des Rolling Chassis genutzt. Ein vollständiger Ausfall der Brems- und Lenkungsfunktion wird sowohl durch eine redundante Steuerungsarchitektur als auch durch die physische Redundanz der Stellglieder verhindert. Dieser Ansatz wird als „fail operational“ bezeichnet, da das System auch im Schadenfall weiterarbeitet. Störungen auf einer Funktionsebene können dabei durch die zweite Funktionsebene der Stellglieder übernommen werden. So wird beispielsweise bei einem Lenkungsdefekt an ein oder zwei Schaeffler Corner Modules die Betriebssicherheit bis zum Nothalt des Fahrzeugs durch eine geschickte Ansteuerung der Bremsen, zusammen mit der Lenkung der funktionstüchtigen Module, sichergestellt. Dieser Redundanzansatz wird im CCU fortgeführt und ermöglicht dadurch eine sichere Ansteuerung der Aktoren im Fehlerfall.
Modularität und Skalierbarkeit
Bei der Umsetzung der Steuerung des Rolling Chassis in Soft- und Hardware hat Schaeffler großen Wert auf Modularität gelegt. Für die Kunden des Rolling Chassis ergibt sich damit ein Höchstmaß an Flexibilität. Unter Beibehaltung der CCU, des Bremsaktors sowie des Batteriemanagement- und des Batterieladesystems können sie nicht nur zwischen verschiedenen Antriebskonzepten wählen, sondern auch andere Parameter des Fahrzeugs in weiten Bereichen an die spezifischen Anforderungen anpassen, Bild 11. Dazu gehört die modulare Auslegung von Fahrzeugrahmen, Batterie, Bremssystem, Lenkung und Radaufhängung.
Die Modularität der wichtigsten Bauteile ist die Basis für die Skalierbarkeit des Fahrzeugs. Damit schafft Schaeffler eine große Bandbreite möglicher Fahrzeugtopologien, die entsprechend dem jeweiligen Bedarf eingesetzt werden können, etwa um einen wendigen Mover für den Personentransport in der Innenstadt oder ein Fahrzeug für die Auslieferung schwerer Waren über längere Strecken aufzubauen. Besonders hohe Flexibilität bietet dabei eine Verwendung von vier Corner Modules, da Fahrzeuglänge und -breite sehr einfach verändert werden können.

Um Kunden die Auswahl der für ihre Anforderungen optimalen Systemauslegung zu erleichtern, hat Schaeffler einen Konfigurator für das Rolling Chassis entwickelt. Das klar gegliederte Menü führt sie dabei über gezielte, logisch aufeinander aufbauende Abfragen zur Wunschkonfiguration, Bild 12. Der Fragenkatalog umfasst dabei Punkte wie:
- Einsatzzweck (Robo-Taxi, Robo-Shuttle für Personentransport oder Cargo-Mover für Gütertransport)
- Einsatzumgebung (urban, interurban (Stadt + Überland), Werksgelände); Einschränkung der wählbaren Fahrzeuggrößen
- Auswahl Fahrzeuggröße und Batteriekapazität (Reichweitenberechnung in Abhängigkeit der Fahrzeugmasse auf Basis von Fahrzyklen, die von der Einsatzumgebung abhängen)
- Auswahl der Corner Modules (Wendekreis, Eignung für Sondermanöver wie Wenden auf der Stelle oder Seitwärtsfahren).

Fahrzeugplattform
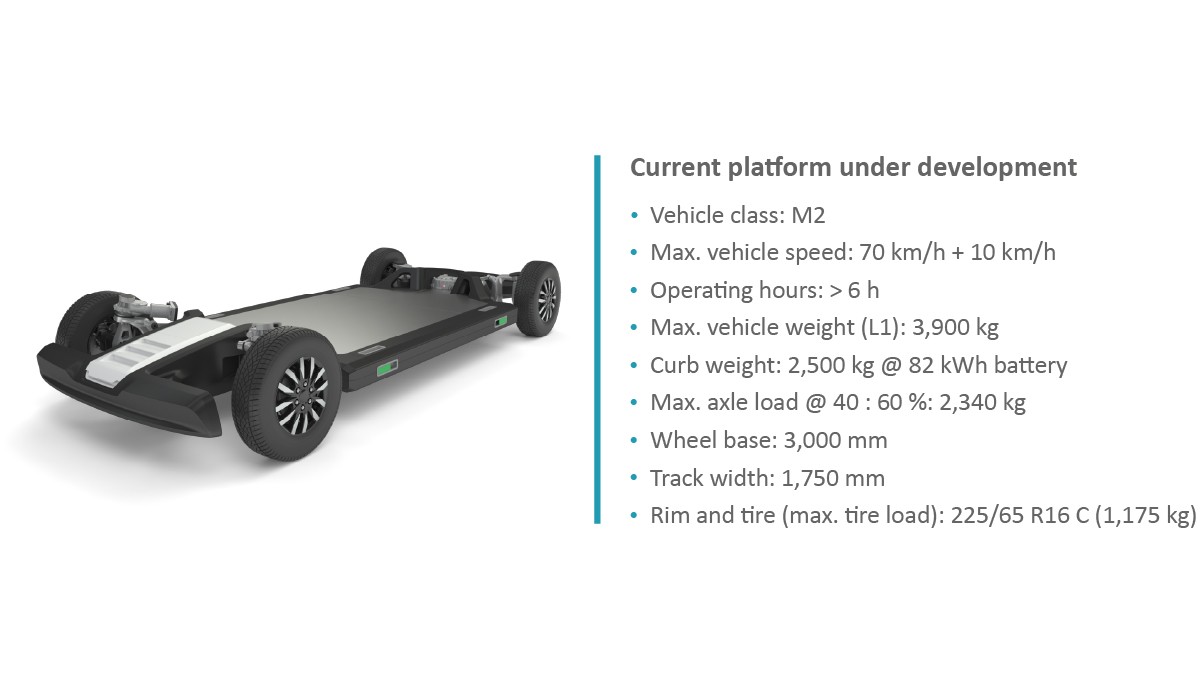
Das derzeit bei Schaeffler in Entwicklung befindliche Rolling Chassis verfügt über einen Antrieb mittels E-Achse. Die technischen Daten sind in Bild 13 zusammengefasst. Um das eigene Know-how im Bereich des hochautomatisierten Fahrens zu ergänzen, arbeitet Schaeffler mit dem Partner Mobileye zusammen. Das Unternehmen gilt als weltweit führend in der Entwicklung von Technologien für Visionssensorik und maschinelles Lernen, Datenanalyse, Lokalisierung und Kartierung für Fahrerassistenzsysteme und autonome Fahrlösungen. Zur Umsetzung der Gesamtfahrzeugfunktion wird das Rolling Chassis mit einer Kabine ausgerüstet, in der alle Sensoren für die Automatisierungsfunktion platziert sind. Der Shuttle verfügt über zwölf Sitz- und drei Stehplätze. Das gibt ihm ausreichende Kapazitäten für den Einsatz im Öffentlichen Personennahverkehrs (ÖPNV). Alternativ können zehn Personen und ein Rollstuhlfahrer transportiert werden. Über eine automatisch ausfahrbare Rollstuhlrampe bietet der Shuttle dabei einen barrierefreien Zugang ins Fahrzeug. Zur Vereinfachung des Batterieladevorgangs ist das Fahrzeug mit einem automatisierten konduktiven Ladesystem ausgestattet. Dabei wird nach Abstellen des Fahrzeugs ein Stromabnehmer auf das in den Boden eingelassene Ladepad abgesenkt und das Fahrzeug über die entstandene elektrische Kontaktierung der Leiter geladen. Durch die direkte physische Verbindung lassen sich hohe Ladeleistungen bei minimalen Verlusten übertragen, sodass geringere Ladezeiten als beispielsweise mit induktiven Ladesystemen realisiert werden können.
Robo-Shuttle-Ökosystem
Konzeptbedingt erfordert der Betrieb von führerlosen Transportsystemen ein umfangreiches Ökosystem, dessen Gestaltung und Aufbau großes Innovationspotenzial bietet. Neben fahrzeugnahen Dienstleistungen wie dem Aufladen der Batterien und der Wartung des Fahrzeugs gehört dazu das Flottenmanagement. An der Kundenschnittstelle lässt sich beispielsweise der Fahrzeugzugang mit Bezahlfunktion durch neue App-Dienste für Smartphones gestalten, idealerweise multimodal und in bestehende Systeme als sogenanntes Mobility-as-a-Service-Angebot eingebunden, um einen nahtlosen Übergang zwischen einzelnen Verkehrsmitteln zu ermöglichen. Um insbesondere kleineren Betreibern wie lokalen Verkehrsbetrieben eine schlüsselfertige Robo-Shuttle-Lösung anbieten zu können, strebt Schaeffler Partnerschaften bei Erstellung und Betrieb der entsprechenden Ökosysteme an. Im Bereich der Ladeinfrastruktur arbeitet Schaeffler unter anderem am oben beschriebenen konduktiven Ladesystem, das ein umständliches Handling schwerer Ladekabel obsolet macht. Zum Laden sind keine manuellen Handgriffe notwendig, sodass der Shuttle vollkommen autonom zur Ladestation fahren und dort geladen werden kann.
Zusammenfassung
Viele Metropolen steuern einer künftig weiter zunehmendem Anzahl an Fahrzeugen im urbanen Raum gegen und versuchen, die Pkw-Dichte zu reduzieren und andere Verkehrskonzepte zu fördern. Auch die Automobilindustrie stellt sich diesen Herausforderungen und entwickelt durch die Verknüpfung von Konnektivität, Elektrifizierung, automatisiertem Fahren und Sharing-Angeboten neue Mobilitätslösungen. Schaeffler hat hierzu bereits vor einigen Jahren den Schaeffler Mover vorgestellt. Das Konzept des Transportsystems sieht ein automatisiertes Fahren des SAE-Levels 4 (Hochautomatisierung) vor. Gemeinsam mit dem Partner Mobileye treibt Schaeffler die Entwicklung weiter voran. Das Ziel ist dabei, einen wirtschaftlichen Betrieb von autonomen Shuttle-Systemen zu ermöglichen und sie dadurch marktfähig zu machen. Dazu entwickelt Schaeffler ein Rolling Chassis, das alle für die Fahrfunktionen relevanten Komponenten, das heißt Antrieb, Bremse, Lenkung und Batterie, modular zusammenfasst. Der Fahrzeugantrieb kann dabei je nach Leistungsbedarf entweder über Radnabenmotoren oder eine E-Achse erfolgen. Zur Umsetzung eines sicheren Steer-by-Wire-Systems für das Rolling Chassis entwickelt Schaeffler mechatronische Hinterachslenkungen als Komplettsystem und einzelne Motor-Elektronik-Einheiten, sogenannte Power-Packs. Die Radaufhängung und die Federung des Rolling Chassis sind in einer kompakten Einheit, dem Corner Module, integriert. Zusätzlich kann das Corner Module Lenkaktor und Radnabenmotor aufnehmen, sodass es flexibel auf die unterschiedlichen Kundenanforderungen angepasst werden kann.
Mithilfe von Partnerschaften für die Gesamtfahrzeugintegration und für die Fahrautomatisierung können auf Basis des Rolling Chassis von Schaeffler Komplettfahrzeuge für den Personen- und Gütertransport verwirklicht werden, vom Robo-Taxi bis zum autonomen Lieferfahrzeug. Durch eine Ergänzung mit intelligenten Infrastruktursystemen und Konnektivitätsmöglichkeiten lassen sich auf dieser Grundlage umfassende Mobilitätslösungen umsetzen, wie sie künftig von Mobilitätsprovidern der öffentlichen Hand oder der Privatwirtschaft angeboten werden. Schaeffler rechnet damit, dass mittelfristig jedes zehnte Fahrzeug auf der Straße ein automatisiertes Transportsystem sein könnte. Robo-Shuttles werden also auch künftig die konventionellen Pkw nicht ersetzen, sondern das Mobilitätsangebot sinnvoll ergänzen.
[1] Presse- und Informationsamt der Bundesregierung (Hrsg.): Verkehr umweltfreundlich machen. https://www.bundesregierung.de/breg-de/themen/klimaschutz/klimaschonender-verkehr-1794672, abgerufen 22. Februar 2022
[2] Deutsche Stiftung Weltbevölkerung (Hrsg.): Im Jahr 2050 werden zwei Drittel der Weltbevölkerung in Städten leben. https://www.presseportal.de/pm/24571/3945595, abgerufen 17. Januar 2022
[3] Der Schaeffler Mover. In: ATZextra „Innovationen für eine nachhaltige und autonome Mobilität“, 2019
[4] Bundesministerium für Digitales und Verkehr (Hrsg.): Gesetz zum autonomen Fahren tritt in Kraft. https://www.bmvi.de/SharedDocs/DE/Artikel/DG/gesetz-zum-autonomen-fahren.html, abgerufen 11. März 2022
[5] Feltz, C. et al.: Chassis-Systeme – Auf dem Weg zum Steer-by-Wire. Bühl: Schaeffler-Kolloquium, 2022